
Page 235 - 최강 아두이노 퍼스트 참고서
P. 235
void setup() {
// attaches the servo on pin 9 to the servo object
// 9 번 포트에 연결합니다.
myservo.attach(9);
}
void loop() {
for (pos = 0; pos <= 180; pos += 1) { // goes from 0
degrees to 180 degrees
// in steps of 1 degree
myservo.write(pos); // tell servo to go to
position in variable 'pos'
delay(15); // waits 15ms for the
servo to reach the position
}
for (pos = 180; pos >= 0; pos -= 1) { // goes from 180
degrees to 0 degrees
myservo.write(pos); // tell servo to go to
position in variable 'pos'
delay(15); // waits 15ms for the
servo to reach the position
}
}
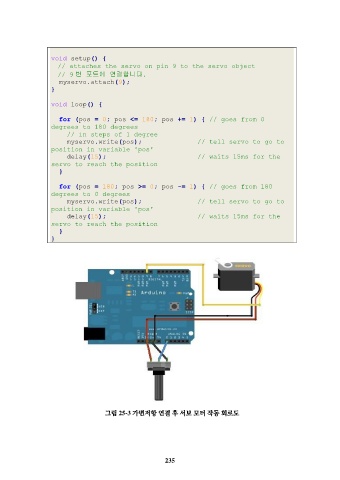
그림 25-3 가변저항 연결 후 서보 모터 작동 회로도
235