
Page 76 - 최강 아두이노 스마트 자동차 로봇 키트
P. 76
방향 조절 방법
아두이노에서 PWM 포트에 연결된 ENA, ENB 에 High 전압을 걸어 주고 IN1, IN2
입력을 조절해서 모터 방향을 제어할 수 있습니다.
ENA, ENB 에 LOW 상태인 경우 IN1, IN2 (IN3, IN4)에 관계없이 정지합니다.
ENA, ENB 에 아두이노 PWM 핀(D3, 5, 6, 9, 10, 11)과 연결 하면 모터의 속도를 변
경 시킬 수 있습니다.
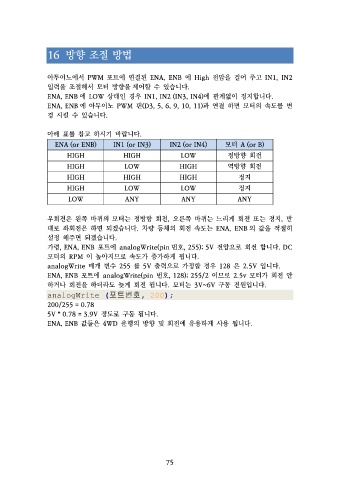
아래 표를 참고 하시기 바랍니다.
ENA (or ENB) IN1 (or IN3) IN2 (or IN4) 모터 A (or B)
HIGH HIGH LOW 정방향 회전
HIGH LOW HIGH 역방향 회전
HIGH HIGH HIGH 정지
HIGH LOW LOW 정지
LOW ANY ANY ANY
우회전은 왼쪽 바퀴의 모터는 정방향 회전, 오른쪽 바퀴는 느리게 회전 또는 정지, 반
대로 좌회전은 하면 되겠습니다. 차량 동체의 회전 속도는 ENA, ENB 의 값을 적절히
설정 해주면 되겠습니다.
가령, ENA, ENB 포트에 analogWrite(pin 번호, 255); 5V 전압으로 회전 합니다. DC
모터의 RPM 이 높아지므로 속도가 증가하게 됩니다.
analogWrite 매개 변수 255 를 5V 출력으로 가정할 경우 128 은 2.5V 입니다.
ENA, ENB 포트에 analogWrite(pin 번호, 128); 255/2 이므로 2.5v 모터가 회전 안
하거나 회전을 하더라도 늦게 회전 됩니다. 모터는 3V~6V 구동 전원입니다.
analogWrite (포트번호, 200);
200/255 = 0.78
5V * 0.78 = 3.9V 정도로 구동 됩니다.
ENA, ENB 값들은 4WD 운행의 방향 및 회전에 유용하게 사용 됩니다.
75