
Page 245 - 최강 아두이노 스마트 자동차 로봇 키트
P. 245
예제 코드 C/C++ 함수 및 내용 설명
방향 전환 작동 기초 함수
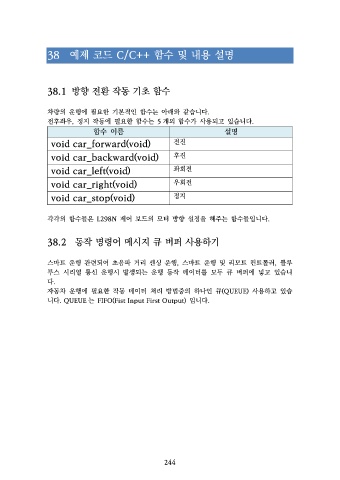
차량의 운행에 필요한 기본적인 함수는 아래와 같습니다.
전후좌우, 정지 작동에 필요한 함수는 5 개의 함수가 사용되고 있습니다.
함수 이름 설명
void car_forward(void) 전진
void car_backward(void) 후진
void car_left(void) 좌회전
void car_right(void) 우회전
void car_stop(void) 정지
각각의 함수들은 L298N 제어 보드의 모터 방향 설정을 해주는 함수들입니다.
동작 명령어 메시지 큐 버퍼 사용하기
스마트 운행 관련되어 초음파 거리 센싱 운행, 스마트 운행 및 리모트 컨트롤러, 블루
투스 시리얼 통신 운행시 발생되는 운행 동작 데이터를 모두 큐 버퍼에 넣고 있습니
다.
자동차 운행에 필요한 작동 데이터 처리 방법중의 하나인 큐(QUEUE) 사용하고 있습
니다. QUEUE 는 FIFO(Fist Input First Output) 입니다.
244