
Page 233 - 최강 아두이노 스마트 자동차 로봇 키트
P. 233
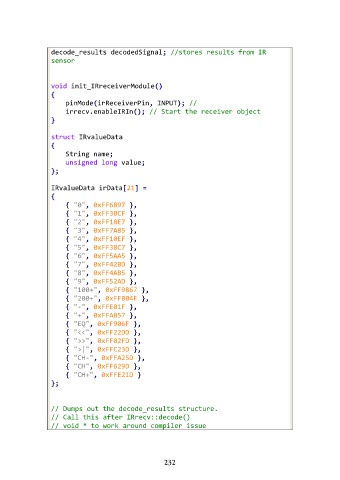
decode_results decodedSignal; //stores results from IR
sensor
void init_IRreceiverModule()
{
pinMode(irReceiverPin, INPUT); //
irrecv.enableIRIn(); // Start the receiver object
}
struct IRvalueData
{
String name;
unsigned long value;
};
IRvalueData irData[21] =
{
{ "0", 0xFF6897 },
{ "1", 0xFF30CF },
{ "2", 0xFF18E7 },
{ "3", 0xFF7A85 },
{ "4", 0xFF10EF },
{ "5", 0xFF38C7 },
{ "6", 0xFF5AA5 },
{ "7", 0xFF42BD },
{ "8", 0xFF4AB5 },
{ "9", 0xFF52AD },
{ "100+", 0xFF9867 },
{ "200+", 0xFFB04F },
{ "-", 0xFFE01F },
{ "+", 0xFFA857 },
{ "EQ", 0xFF906F },
{ "<<", 0xFF22DD },
{ ">>", 0xFF02FD },
{ ">|", 0xFFC23D },
{ "CH-", 0xFFA25D },
{ "CH", 0xFF629D },
{ "CH+", 0xFFE21D }
};
// Dumps out the decode_results structure.
// Call this after IRrecv::decode()
// void * to work around compiler issue
232