
Page 212 - 최강 아두이노 스마트 자동차 로봇 키트
P. 212
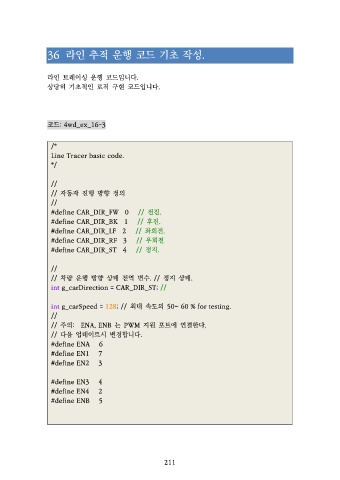
라인 추적 운행 코드 기초 작성.
라인 트레이싱 운행 코드입니다.
상당히 기초적인 로직 구현 코드입니다.
코드: 4wd_ex_16-3
/*
Line Tracer basic code.
*/
//
// 자동자 진행 방향 정의
//
#define CAR_DIR_FW 0 // 전진.
#define CAR_DIR_BK 1 // 후진.
#define CAR_DIR_LF 2 // 좌회전.
#define CAR_DIR_RF 3 // 우회전
#define CAR_DIR_ST 4 // 정지.
//
// 차량 운행 방향 상태 전역 변수. // 정지 상태.
int g_carDirection = CAR_DIR_ST; //
int g_carSpeed = 128; // 최대 속도의 50~ 60 % for testing.
//
// 주의: ENA, ENB 는 PWM 지원 포트에 연결한다.
// 다음 업데이트시 변경합니다.
#define ENA 6
#define EN1 7
#define EN2 3
#define EN3 4
#define EN4 2
#define ENB 5
211