
Page 145 - 최강 아두이노 스마트 자동차 로봇 키트
P. 145
장애물 감지 방향 전환 결정
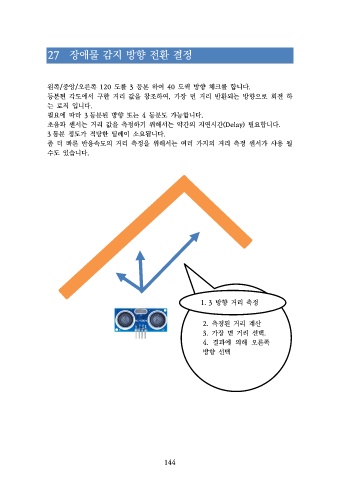
왼쪽/중앙/오른쪽 120 도를 3 등분 하여 40 도씩 방향 체크를 합니다.
등분된 각도에서 구한 거리 값을 참조하여, 가장 먼 거리 반환되는 방향으로 회전 하
는 로직 입니다.
필요에 따라 3 등분된 방향 또는 4 등분도 가능합니다.
초음파 센서는 거리 값을 측정하기 위해서는 약간의 지연시간(Delay) 필요합니다.
3 등분 정도가 적당한 딜레이 소요됩니다.
좀 더 빠른 반응속도의 거리 측정을 위해서는 여러 가지의 거리 측정 센서가 사용 될
수도 있습니다.
1. 3 방향 거리 측정
2. 측정된 거리 계산
3. 가장 먼 거리 선택.
4. 결과에 의해 오른쪽
방향 선택
144